

به دنیای جذاب بیومکانیک خوش آمدید. مقاله پیش رو چهارمین مقاله از مجموعه مقالات بیومکانیک مفاصل است. این بار به سراغ مفصل مهم زانو رفتیم. امیدواریم آنچه در ادامه میخوانید مورد توجه شما همراهان قرار گرفته و مفید واقع شود.
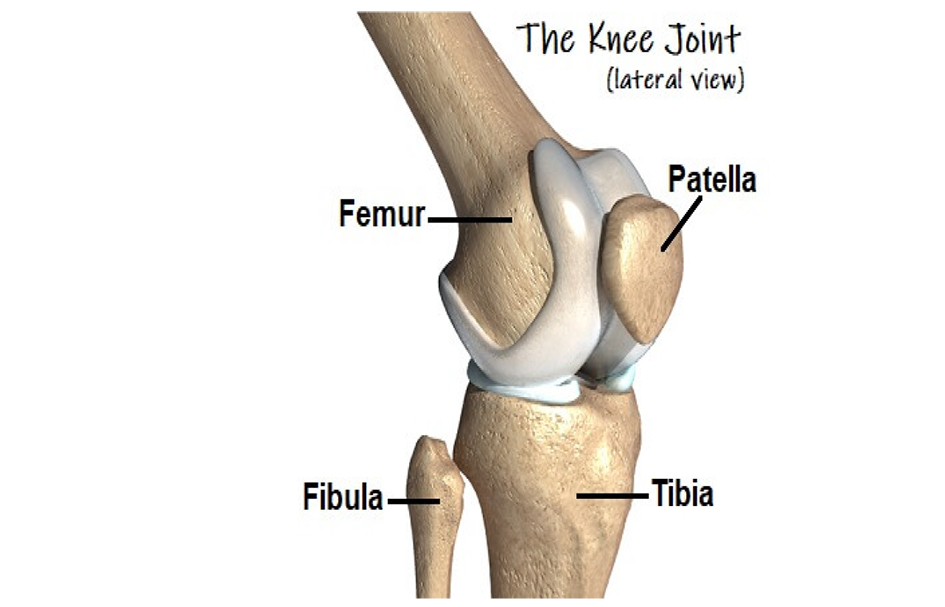
مفصل زانو (Knee) شامل 4 استخوان ران (Femur)، کشکک (Patella)، درشتنی (Tibia) و نازکنی (Fibula) است که در واقع دو مفصل را تشکیل میدهند. یکی مفصل اصلی زانو یا درشتنی-رانی (Tibio-femoral) و دیگری مفصل کشکک-رانی (Patello-femoral) است. مفصل درشتنی-رانی زانو به شکل لقمهای (Condylar) است که در آن یک درجه آزادی غالب و اصلی به نام فلکشن/اکستنشن (Flexion/Extension) وجود دارد اما در مقیاس کوچکتر تقریباً هر شش درجه آزادی (سه انتقال و سه دوران) را دارد (به ویژه حرکت اندک چرخش محوری یا رتیشن Rotation). شکل ۱ را ببینید.

شکل 1 – استخوانها و درجات آزادی حرکت مفصل زانو
اما در مورد مفصل کشکک-رانی در زانو، حرکت کشکک هر شش درجه آزادی حرکت را دارد. سه نوع انتقال یا ترنسلیشن (Translation/Shift) در جهات قدامی-خلفی (آنتریور-پوستریور)، داخلی-خارجی (مدیال-لترال)، و بالا و پایین یا پروگزیمال-دیستال دارد. همچنین سه نوع دوران به نامهای فلکشن، تیلت و رتیشن دارد که این موضوع حرکات این مفصل را پیچیدهتر میکند و نوع و دامنه حرکات مذکور، بستگی به هندسه مفصل و مکانیزم بافتهای نرم اطراف مفصل (عضلات، تاندونها، لیگامانها …) دارد (شکل ۲).

شکل 2 – شش درجه آزادی مفصل کشکک-رانی (سه انتقال و سه دوران)
همچنین آنگونه که از هندسه مفصل کشکک-رانی برمیآید در کل کشکک در شیار بین دو کندیل استخوان ران به نام شیار تروچلی (Trochlear groove) قرار میگیرد و حرکت میکند و در زوایای فلکشن مختلف زانو، ارتفاع این شیار و به تبع آن سطح تماس بین سطوح کشکک و کندیلهای ران تغییر میکند. در شکل 3 مشخص است که چگونه در زوایای فلکشن مختلف میزان تغییر هندسه و ارتفاع شیار و همچنین توزیع فشار و سطح تماس مفصل تغییر میکند. در کل در زاویه فلکشن بالاتر ارتفاع شیار افزایش مییابد، توزیع فشار سطح تماس نیز به گونهای است که در زوایای پایینتر کمتر، و رفته رفته با افزایش زاویه فلکشن، فشار تماس زیاد میشود تا جایی که در زوایای بسیار بالا (حدود 120 درجه) سطح تماس از یک ناحیه به دو ناحیه متمرکز تقسیم میشود و تمرکز فشار ایجاد میکند.

شکل 3 – هندسه و ارتفاع شیار تروچلی (بین کندیلهای ران) و توزیع فشار سطح تماس مفصل در زوایای فلکشن مختلف
محور دوران مفصل زانو نیز خود مبحث جالبی است زیرا یک محور ثابت نیست و با تغییر زاویه فلکشن جابهجا میشود، از این رو به آن محور آنی دوران مفصل میگویند. جهت محاسبه محل محور آنی دوران مفصل از روش مشابه در دینامیک ماشین و طراحی مکانیزمها استفاده میشود، به این صورت در دو زاویه فلکشن مختلف، عمود منصفهای دو بردار جابهجایی در دو نقطه مشخص از انتهای دستال استخوان ران رسم میشوند، هر جا یکدیگر را قطع کردند محل محور آنی دوران است. به این ترتیب از نمای ساجیتال، مکان هندسی محور آنی دورانی زانوی طبیعی به شکل حرف C محاسبه شده است. از نمای ترنسورس نیز، با تغییر فلکشن زانو، محور آنی نیز طوری تغییر میکند که اندکی رتیشن نیز در زانو ایجاد میشود. شکل ۴ این موضوع را به خوبی نشان میدهد.

شکل 4 – محاسبه و نمایش محل و مکان هندسی محور آنی دوران زانو از نمای ساجیتال و ترنسورس
یکی از علل آنی بودن محور دوران مفصل، رخداد همزمان دو پدیده غلتش و لغزش در مفصل است. که یکی از عوامل این پدیده، وجود کشش در لیگامان (رباطهای) صلیبی زانو است که موحب پایداری مفصل میشود. لیگامان صلیبی قدامی (یا همان رباط ACL) از لغزش ران بر روی درشتنی به سمت عقب جلوگیری میکند. لیگامان صلیبی خلفی (یا همان رباط PCL) نیز مانع همین نوع لغزش به سمت جلو میشود. این دو لیگامان به همراه دو استخوان ران و درشتنی با یکدیگر یک مکانیزم با چهار لینک را تشکیل میدهند که حرکت این مکانیزم با توجه به اینکه دو لینک با طول ثابت (دو استخوان) و دو لینک با طول متغیر (دو لیگامان) دارد، به نحوی است که در زوایای مختلف فلکشن زانو، کشش لیگامانها تغییر میکند و تنظیم میشود تا غلتش و لغزش آن را تنظیم کرده و پایداری مفصل را تأمین کند (شکل 5).

شکل ۵ – رخداد غلتش و لغزش در مفصل به همراه نحوه عملکرد و کشش لیگامانهای صلیبی با ایجاد مکانیزمی با چهار لینک در زوایای مختلف فلکشن مفصل زانو
اجزاء مهم دیگر زانو، مینیسکهای داخلی و خارجی هستند که عملکرد بیومکانیکی بسیار مهمی در مفصل دارند. مینیسکها لایههای فیبری-غضروفی (فیبروکارتیلاژ) هستند که انحنای هلالی شکل داشته و روی دو سطح (پلاتوی) داخلی و خارجی درشتنی قرار میگیرند. مینیسک داخلی C شکل و مینیسک خارجی O شکل است. در تماس سطح مفصل کندیل ران با پلاتوی درشتنی، مشابه تماس یک گوی با سطح صاف یا دو گوی با هم، بدون حضور مینیسک سطح تماس کاهش مییابد و تمرکز فشار ایجاد میشود که به مرور ناهنجاری در غضروف مفصلی ایجاد میکند. لذا با حضور مینیسک این سطح تماس افزایش مییابد و توزیع فشار مفصلی یکنواختتر میشود تا از تمرکز آن جلوگیری شود. البته به دلیل وجود غلتش و لغرش همزمان در هنگام فلکشن زانو، مینیسکها نیز تا حدی جابهجا میشوند تا این امکان را فراهم کنند و در عین حال مانند نگهدارنده لاستیک، پایداری مفصل را حین حرکت فلکشن حفظ کنند (شکل 6).

شکل 6 – میزان حرکت و تأثیر عملکرد مینیسکها در توزیع فشار مفصل زانو
از عضلات مهم این مفصل، از دو دسته کلی عضلات چهارسر ران (Quadriceps) و همسترینگ میتوان نام برد. عضلات چهارسر ران شامل عضلات پهن میانی، داخلی، خارجی
(Vastus Intermedius/Medialis/Lateralis) و راست رانی
(Rectus Femoris) هستند که عملکرد کلی آنها اکستنشن زانو است اما عضله راست رانی که دو مفصلی است، از مفصل ران نیز عبور کرده و به فلکشن آن نیز کمک میکند. عضلات همسترینگ شامل عضلات نیم غشائی
(Semimembranosis)، نیم وتری (Semitendinosis)، و دوسررانی (Biceps Femoris) هستند که همگی دو مفصلی (ران و زانو) بوده و عملکرد کلی آنها فلکشن زانو و اکستنشن ران است (شکل 7).

شکل 7 – اسامی گروه عضلات چهارسرران و همسترینگ در مفصل زانو
انتهای همه عضلات چهارسر ران در سمت زانو به تاندون چهارسرران (Quadriceps Tendon) ختم میشود که در ادامه با عبور طناب تاندونی از روی کشکک، به تاندون کشکک (Patellar Tendon) میرسد و به زائدهای در جلوی انتهای پروگزیمال درشتنی متصل میشود. لذا نیروی عضلات چهارسر ران نیز در نهایت از طریق طناب تاندونی مذکور به درشتنی انتقال مییابد. اگر شخصی در حالت ایستاده زانویش را خم کند، از نمای ساجیتال وزن بالاتنه حول زانو گشتاور فلکسور اعمال میکند، لذا عضلات چهارسر ران فعال میشوند که با اعمال گشتاور اکستنسور و انتقال آن از طریق تاندون چهارسرران، با گشتاور وزن بالاتنه مقابله کنند. در عین حال به خود استخوان کشکک نیز نیروی دو تاندون چهارسرران و تاندون کشکک وارد میشود که برآیند آنها نیروی مفصل کشککرانی است. لذا با افزایش زاویه فلکشن زانو، زاویه بین دو نیروی تاندونی کاهش مییابد و در نتیجه اندازه نیروی مفصل کشکک رانی نیز افزایش مییابد (شکل ۸).

شکل 8 – عملکرد تاندون چهارسرران و تاندون کشکک در ایجاد طناب تاندونی برای انتقال گشتاور اکستنسور حول زانو و مقابله آن با گشتاور
فلکسور وزن بالاتنه و تغییر نیروی برآیند آنها (نیروی مفصل کشکک رانی) با تغییر فلکشن زانو
حالا برای درک بهتر، یک تحلیل بیومکانیکی را در زانو به صورت مسئله محاسباتی بررسی میکنیم:
مسئله: مطابق شکل شخصی در حال تقویت عضلات چهارسرران با وزنه روی پا است. با توجه به فواصل، زوایا و وزنهای داده شده، مقدار نیروی تاندون کشکک (FM)، اندازه و جهت نیروی مفصل درشتنی-رانی زانو (FJ) را محاسبه کنید.
a=12 cm, b=22 cm, c=50 cm, β=450, θ=150, W0=100 N, W1=150 N

حل مسئله: همیشه مسئله را به گامهای مختلف سادهتر تقسیم کنید تا حل آن آسانتر و قابل فهمتر شود.
گام اول: دادههای ورودی و آنتروپومتریک مورد نیاز را محاسبه یا لیست میکنیم:
a=12 cm, b=22 cm, c=50 cm, β=450, θ=150, W0=100 N, W1=150 N
گام دوم: رابطه تعادل گشتاورها را حول مفصل درشتنی-رانی زانو برای محاسبه نیروی تاندون کشکک مینویسیم: (گشتاور یک نیرو = حاصل ضرب نیرو در فاصله عمودی آن تا مفصل زانو، جهت پادساعتگرد یا اکستنسور مثبت)
∑ Mo (ccw+)=0⇒
aFM sin θ -bW1 cos β-cWo cos β=0⇒FM=1889.67 N
مقدار نیروی تاندون کشکک به دست آمد حالا به سراغ گام بعدی که نیروی مفصل است میرویم.
گام سوم: رابطه تعادل نیروها را در دو راستای افقی و عمودی برای محاسبه اندازه و جهت نیروی مفصل مینویسیم: (اندازه با FJ و جهت با ϕ مشخص شده است.)

همانطور که در شکل بالا میبینید نیروی مفصل زانو (FJ) در دو راستای افقی و عمودی تصویر شده و زاویه آن با راستای افقی ϕ گرفته شده که بناست این پارامترها را با روابط تعادل نیرویی در این دو راستا به دست آوریم. جهات مثبت محورهای x و y هم مشخص هستند. داریم:
نیروی افقی مفصل
∑Fx (→+)=0⇒FJx-FM cos (θ+β)=0⇒FJx=944.83 N
نیروی قائم مفصل
∑Fy(↑+)=0⇒-FJy+FM sin θ-W1-W0=0⇒FJy=1386.5 N
⇒FJ=√(F2Jx+F2Jy=1677.82 N . ∅=arctan(FJy/FJx )=55.73o
همیشه به خاطر داشته باشید که پس از محاسبه نتایج، حتماً آنها را بررسی کنید و مطمئن شوید آیا منطقی هستند یا خیر. همچنین در گام بعدی که بسیار هم مهم است باید آنها را تحلیل و تفسیر کنیم.
گام چهارم: نتیجهگیری نهایی با تحلیل و تفسیر نتایج
فقط یک تاندون کشکک به صورت تک نیرو لحاظ شده بود در حالی که عضلات اطراف پشت زانو مانند همسترینگ نیز حضور دارند و در نیروی مفصل تأثیر میگذارند ولی اگر بخواهیم چند عضله را به جای یک عضله یا تاندون وارد تحلیل مسئله کنیم، روشهای حل پیچیدهتر میشود که در صورت وجود فرصت، در مقالات آینده به آن خواهیم پرداخت.
از آنجا که بحث بیومکانیک مفصل کشکک رانی نیز مطرح شد، یک مسئله دیگر در ادامه مسئله قبل راجع به این موضوع آورده میشود. منتهی به دلیل محدودیت فضا، گامهای جداگانه برایش نمیآوریم (گامها را جداگانه برای خود تحلیل کنید).
مسئله 2: با توجه به نتیجه مسئله قبل، با فرض اینکه نیروهای تاندون کشکک و تاندون عضله چهارسر ران (FM) یکسان هستند، اندازه (FP) و جهت (γ) نیروی مفصل کشکک رانی مفصل کشکک رانی را محاسبه کنید.

حل: با توجه به اینکه دو مجهول اندازه و جهت نیروی مفصل کشکک رانی وجود دارد، دو معادله تعادل نیرویی برای محاسبه آنها کافی است لذا برای تعادل کشکک داریم (از وزن کشکک صرف نظر شدهاست):
FM=1889.67 N , α=θ+β=60o
نیروی افقی مفصل
∑Fx (→+)=0⇒FPx+FM cos α-FM=0⇒FPx=944.83 N
نیروی قائم مفصل
∑Fy (↑+)=0⇒FPy-FM sin α=0⇒FPy=1636.5 N
⇒FP=√(F2Px+F2Py )=1889.67 N . γ=arctan(FJy/FJx)=60.00o
در مسئله 2 نیز (با توجه به شرایط فرد در مسئله 1) نیروی مفصل کشکک-رانی نیز بالا به دست آمد (حتی بیشتر از مفصل درشتنی رانی). جالب اینجاست که سه نیروی موجود در شکل مسئله ۲، یک مثلث متساوی الاضلاع با زاویه 60 درجه تشکیل میدهند. در کل گویا نیروهای درشتنی رانی و کشکک رانی با هم رابطه مستقیم دارند.
توصیه میشود پس از تحلیل هر مسئله، دادهها را تغییر بدهید و بار دیگر آن را تحلیل کنید و ببینید چقدر مسئله را درک کردهاید. برای مثال در مسئلههای قبل فرض دادهها را به صورت زیر فرض کنید و مجدداً محاسبات هر دو مفصل زانو را انجام دهید:
a=8 cm, b=20 cm, c=46 cm, β=57o, θ=13o, W0=85 N, W1=125 N
همانطور که پیشتر اشاره شد، عضلات و لیگامانهای بیشتری در زانو وجود دارد و در نتیجه برای تحلیل بیومکانیکی (استاتیکی یا دینامیکی) یک حرکت اکستنشن زانو یا تقویت چهارسرران، نمیتوان صرفاً یک دسته عضله یا تاندون را لحاظ کرد؛ به علاوه، در حالت سه بعدی خود عضلات چهارسر ران چندین فیبر در جهات مختلف دارند (همینطور عضلات همسترینگ). لذا برای تحلیل دقیقتر باید تأثیر همه فیبرهای عضلانی مهم را در زانو وارد کرد که این امر معمولاً مستلزم به کارگیری روشها یا نرمافزارهای تحلیل محاسباتی یا المان محدود است. شکل 9 نمونههایی از جهات مختلف نیروهای فیبرهای عضلانی، تاندونی و لیگامانی مؤثر در زانو را نشان میدهد.

شکل 9 – جهات مختلف فیبرهای عضلانی، تاندونی، و لیگامانی مؤثر در مفصل زانو
البته نکات بسیار بیشتری در تحلیل بیومکانیکی مفصل زانو وجود دارد که پرداختن به تمامی آنها در ظرفیت محدود این مقاله نمیگنجد اما امیدواریم آنچه در این مقاله مطرح شد مورد توجه علاقهمندان قرار بگیرد.
منابع:
– Biomechanics and motor control of human movement,
David A. Winter.
– Fundamentals of biomechanics, Equilibrium, Motion, and Deformation, Nihat Ozkaya, Dawn Leger, David Goldsheyder, Margareta Nordin.
– Kinesiology of the musculoskeletal system, Foundations for Rehabilitation, Donald A. Neumann.
– Biomechanical basis of human movement, Josef Hamill, Kathleen M. Knutzen, Timothy R. Derrick.
– Basic Biomechanics, Susan J. Hall.


دیدگاه ها