

به دنیای جذاب بیومکانیک خوش آمدید. گفته شد که بحث دینامیک معکوس در تحلیل بیومکانیک حرکت بسیار پرکاربرد است. مراحل گذشته در روند دینامیک معکوس که شامل بررسی ابزارهای سنجش و اندازهگیری پارامترهای سینماتیکی (موقعیت، زاویه، سرعت، شتاب و…)، سینماتیک معکوس (محاسبات زوایا از روی موقعیتهای اعضا و مفاصل)، مشتقگیریها و محاسبات سرعت و شتاب، خود بحث دینامیک معکوس (محاسبات سینتیکی نیروها و گشتاورهای برآیند مفصلی) و تخمین نیروهای عضلانی به روش بهینهسازی میشد، مورد بررسی قرار گرفت.
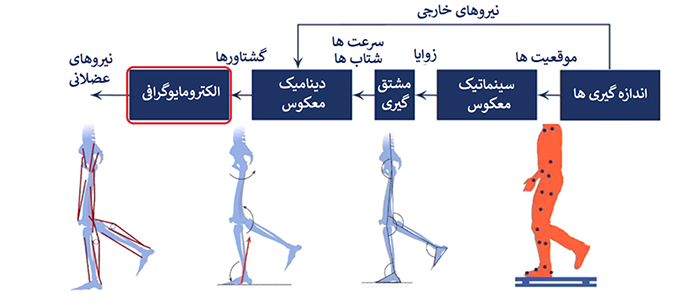
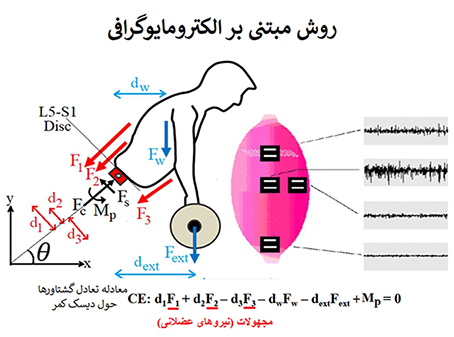
در این قسمت مطابق شکل ۱، به همان تخمین نیروهای عضلانی با روش الکترومایوگرافی یا ثبت سیگنال EMG میپردازیم.
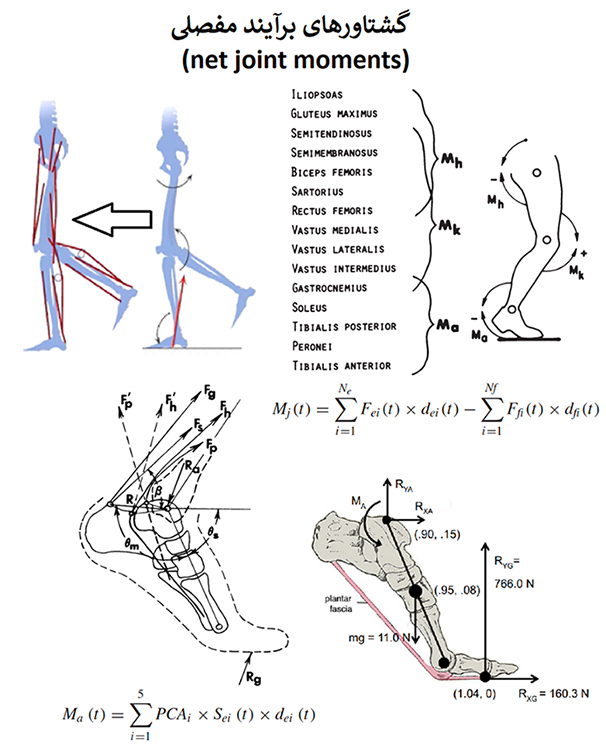
در شماره گذشته اشاره شد که در انتهای معادلات تعادل گشتاوری حاصل از دینامیک معکوس، گشتاور برآیند مفصلی محاسبه میشود که به طور عمده ناشی از نیروهای عضلات اطراف مفصل است، هرچند عوامل دیگری همچون نیروهای بافتهای پسیو لیگامانی، یا اصطکاک مفصلی نیز در گشتاور برآیند مفصلی تأثیر دارند، منتهی نسبت به نیروهای عضلات، ناچیز و قابل صرفنظر هستند. لذا از روی گشتاور برآیند مفصلی، نیروهای عضلانی میبایست محاسبه یا تخمین زده شوند. شکل 2، نمونههایی از نمایش گشتاورهای برآیند مفاصل اندام تحتانی را به همراه تأثیر نیروهایی عضلانی نشان میدهد. به عبارتی دیگر، برآیند گشتاورهای حاصل از نیروهای عضلانی حول مفصل برابر همان گشتاور برآیند مفصلی (Net Joint Moment) است.
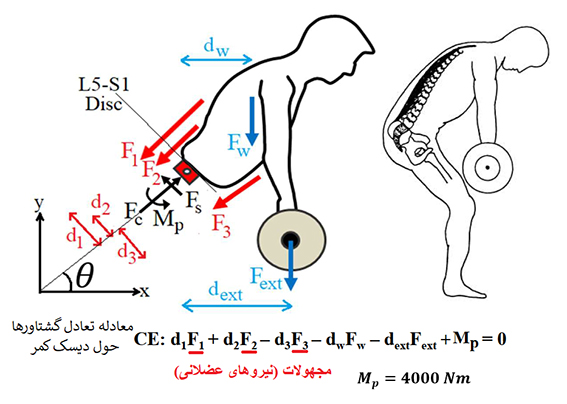
در تخمینهای نیروهای عضلانی به روش بهینه سازی، طبق باربرداری شکل ۳، ذکر شد که نیروهای عضلات شکمی که گشتاور خلاف جهت عضلات کمری و همجهت با بار خارجی اعمال میکند، آنتاگونیست است (و به ضرر سیستم است زیرا باعث افزایش نیرو و فشار دیسک کمر میشود، ولی اساس بهینهسازی بر مبنای کمتر کردن اعمال نیرو به عضلات و مفاصل است). در حالیکه گشتاور حاصل از نیروهای عضلات کمری به نفع سیستم است و با گشتاور وزن و بار خارجی مقابله میکند و آگونیست است. لذا روش بهینهسازی به جهت مینیمم کردن، نیروهای عضلات انتاگونیست شکمی را صفر میکند، در حالی که در واقعیت ممکن است اینگونه نباشد و عضلات شکمی نیز در این فعالیت، نیرو داشته باشند. این موضوع یکی از ایرادات روش بهینهسازی است. ضمن اینکه روش بهینهسازی کاملاً مبتنی بر محاسبات ریاضی است و مبنای فیزیولوژیک ندارد و همچنین در تخمین فعالیت عضلات بین افراد مختلف و حتی در یک فرد با تکرار حرکات مختلف تفاوت قائل نمیشود، در حالیکه در واقعیت ممکن است اینگونه نباشد.
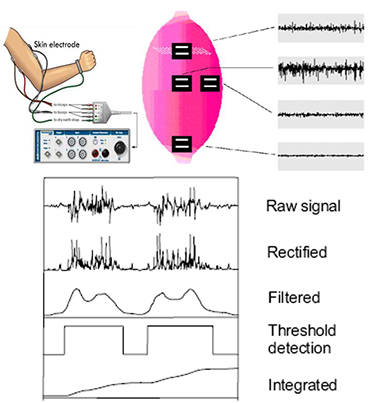
از این رو، روشی دیگر که مبتنی بر ثبت سیگنال الکترومایوگرافی عضلات است، به کار گرفته میشود تا تأثیر فیزیولوژی عصبی عضلانی بدن و همچنین تفاوت فعالیت عضلات در تکرار حرکت فرد و بین افراد مختلف در نظر گرفته شود. لذا مطابق شکل ۴، از روش ثبت سیگنال سطحی عضلات (sEMG) استفاده میشود. الکترودهای سطحی EMG بیشتر به هدف تحلیل عضلات در فعالیت خاص هستند و الکترودهای سوزنی بیشتر به هدف تشخیص فعالیت ناهنجاری عضلهای خاص در عمق بافتهای بدن استفاده میشود. در بحث مربوط به این مقاله، از روش سطحی بیشتر استفاده میشود. منتهی چالشهایی از قبیل دشواریهای نصب الکترود و عملیات آزمایشگاهی برای هر فرد مجزا، پاک کردن آلودگیها و چربیها از روی پوست به جهت رسانایی بهتر سیگنال عضله، هزینهبر و زمانبر بودن تست، پردازش سیگنال عضلات و حذف نویز، دشواری یافتن محل نصب الکترود برای برخی افراد که چربی زیر پوستی بیشتری دارند، یافتن تعداد کانال مناسب دستگاه الکترومایوگرافی برای تعداد کافی از عضلات مهم، چالش در یافتن رابطه محاسباتی بین ولتاژ سیگنال و نیروی عضله و…. را دارد.
شکل ۵، نیز مراحل کلی پردازش سیگنال الکترومایوگرافی را به طور شماتیک نشان میدهد. در ابتدا باید صفر سیگنال تنظیم شود و اگر اصطلاحاً Drift دارد برطرف شود. سپس به جهت اینکه، اندازه دامنه سیگنال EMG برای ما مهم است (نه مثبت و منفی بودن آن)، قدر مطلق سیگنال گرفته میشود و اصطلاحاً یکسوسازی میشود. در ادامه به جهت حذف نویز برق شهر که معمولاً با اتصال دستگاه به برق، بر روی سیگنال سوار میشود، لازم است سیگنال با تبدیلاتی مثل فوریه از حوزه زمان به حوزه فرکانس برده شود و با فیلتر میان نگذر (Notch) فرکانس برق شهر (50 هرتز) از میانه آن حذف شود و سپس با تبدیل معکوس فوریه به حوزه زمان بازگردانده شود. در ادامه به جهت حذف اعوجاجات بالای سیگنال و حالت نویزآلود آن، از روشهای مختلف هموارسازی سیگنال مانند میانگین گرفتن، فیلتر پایین گذر حوزه فرکانس باترورث (Butterworth) و حتی گرفتن مجموع مجذور مربعات یا مقدار مؤثر سیگنال (RMS) استفاده میشود تا اطلاعات مفید سیگنال به شکل نسبتاً هموار از آن استخراج شود. بهطور معمول برای تبدیل ولتاژ سیگنال به نیروی عضله از همین مقدار مؤثر یا RMS سیگنال استفاده میشود.
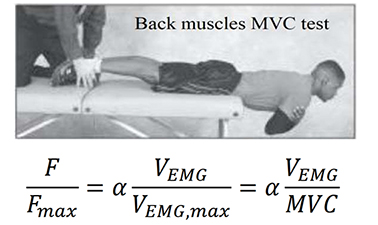
پس از اینکه الکترومایوگرافی عضلات مورد نظر کمری و شکمی در فعالیت باربرداری مذکور گرفته شد، باید با طی مراحل پردازش سیگنال اطلاعات مفید یا همان مقدار مؤثر (RMS) عضلات محاسبه شود تا به کمک آنها نیروهای عضلانی تخمین زده شوند. منتهی تبدیل این ولتاژ RMS به نیرو، پیچیدگیهای خاص خود را دارد و طی مطالعات مختلف انجام شده (به خصوص در حرکات دینامیکی با سرعت قابل توجه) این رابطه به صورت معادله دیفرانسیل و پیچیده است. منتهی در حالت خاصی که فعالیت ما استاتیک یا شبه استاتیک (با سرعت خیلی کم) باشد، این رابطه به یک تناسب خطی مطابق شکل ۶ تبدیل میشود. این تناسب اذعان میکند که نسبت نیروی عضله F به نیروی ماکزیمم آن Fmax برابر است با ضریبی از نسبت مقدار مؤثر ولتاژ VEMG عضله به مقدار مؤثر ولتاژ ماکزیمم آن که MVC نام دارد. در واقع MVC همان ماکزیمم انقباض ارادی عضله است که برای هر عضله خاص یک نوع تست فعالیتی دارد. به طور مثال در شکل 6، برای اندازهگیری MVC عضلات ارکتور اسپاین کمری، شخص به طوری بر روی میز قرار گرفته است که بالا تنه او معلق در هوا باشد و عضلات کمری بیشتری فعالیت ممکن را انجام دهند و با گشتاور فلکسور وزن بالاتنه حول کمر مقابله کنند. لذا در کل باید فعالیتی طراحی شود که عضلات را وادار به تولید حداکثر انقباض و حداکثر دامنه ولتاژ در سیگنال مربوطه کند. ضریب α که در رابطه تناسبی شکل 6 مشاهده میشود تا حدی مربوط به میزان و سرعت و درصد فعالیت فیبرهای عضلانی است که عددی بین صفر و یک است، زیرا در یک فعالیت ممکن است همه نیاز به فعال شدن همه فیبرهای عضلانی نباشد و درصدی از آنها وارد عمل شوند.
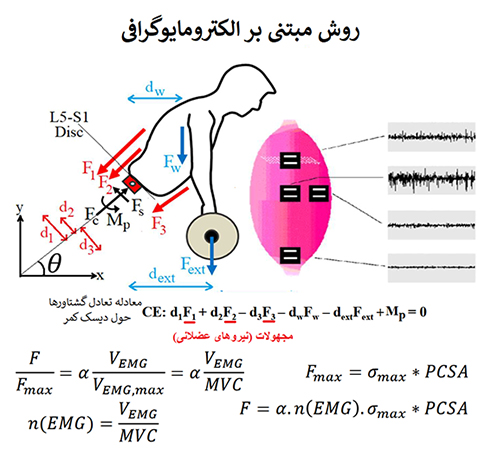
در ادامه به جهت تکمیل رابطه بین نیرو و ولتاژ EMG عضله، پارامترهای تعریف و اضافه میشوند. نیروی ماکزیمم عضله (Fmax) در واقع حاصلضرب تنش ماکزیمم آن (σmax) در سطح مقطع فیزیولوژیک عضله (PCSA) است. تنش ماکزیمم عضله که طی مطالعات مختلف آزمایشگاهی بین 0.1 تا 1 مگاپاسکال به دست آمده است، در برخی حالات طبیعی به طور میانگین 0.6 مگاپاسکال فرض میشود. سطح مقطع فیزیولوژیک PCSA عضلات نیز از روی تصاویر MRI با مقطع عرضی (Transverse) یا از روی عضلات جسد قابل اندازهگیری میباشد. به نسبت VEMG به MVC پارامتر ایامجی نرمالیزه شده n(EMG) گفته میشود که طبیعتاً باید بین صفر و یک باشد. خلاصه با تکمیل این تناسب رابطه خطی نهایی که بین نیرو و ولتاژ EMG عضله وجود دارد مطابق شکل ۶ به دست میآید که برای تحلیل مسئله باربرداری مذکور در شکل ۷ از این رابطه استفاده شده است.
فرضیات لحاظ شده در مسئله باربرداری مذکور در شکل ۷ عبارتند از:
d1, d2, d3: از 1 تا 3 به ترتیب، بازوی گشتاور عضلات سرتاسری کمری، موضعی کمری و شکمی
Mp: گشتاور غیرفعال (پسیو) تحمل شده در دیسک L5-S1
σmax: تنش ماکزیمم عضلات که برای همگی 0.6 مگاپاسکال فرض شده است.
PCSA عضلات مذکور به ترتیب از 1 تا 3، برابر 1900، 2200 و 600 میلیمتر مربع فرض شده است.
درصد فعالیت EMG عضلات از 1 تا 3 به ترتیب، 75%، 60% و 15% فرض شده است.
ضریب α برای همه عضلات یکسان فرض شده است که از ترکیب تناسب EMG با معادله تعادل گشتاور عضلات میبایست محاسبه شود و عددی بین صفر و یک بدست بیاید.
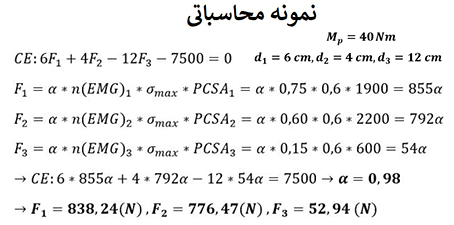
همانطور که در نتایج محاسبات شکل 8 مشاهده میشود، فعالیت عضلات کمی اندک است (با توجه به بحث گشتاور خلاف جهت و آنتاگونیست بودن)، منتهی صفر نیست. ایرادی که روش بهینهسازی داشت، فعالیت عضلات شکمی را صفر میکرد، منتهی در واقعیت فعالیت EMG آن صفر نیست. این موضوع برتری این روش را نسبت به روش قبل نشان میدهد، منتهی روش EMG نیز چالشهای خود را دارد که پیشتر در این مقاله ذکر شد.
این مقاله نیز به مبحث تخمین نیروهای عضلانی مدل چند عضلهای به روش الکترومایوگرافی پرداخت و به امید خدا در مقاله آینده، ادامه جزئیات و ویژگیهای الکترومایوگرافی و همچنین روشهای ترکیبی بین الکترومایوگرافی و بهینهسازی در تخمین نیروهای عضلانی بررسی خواهند شد.
به دوستانی که در حوزههای مرتبط با بیومکانیک فعالیت میکنند توصیه میشود منابع این مقاله را که از جمله منابع اساسی و بنیادین بیومکانیک هستند مطالعه کنند.
Biomechanics and motor control of human movement, David A. Winter.
Fundamentals of biomechanics, Equilibrium, Motion, and Deformation, Nihat Ozkaya, Dawn Leger, David
Goldsheyder, Margareta Nordin.
Kinesiology of the musculoskeletal system, Foundations for Rehabilitation, Donald A. Neumann.
Biomechanical basis of human movement, Josef Hamill, Kathleen M. Knutzen, Timothy R. Derrick.
Basic Biomechanics, Susan J. Hall.


دیدگاه ها