

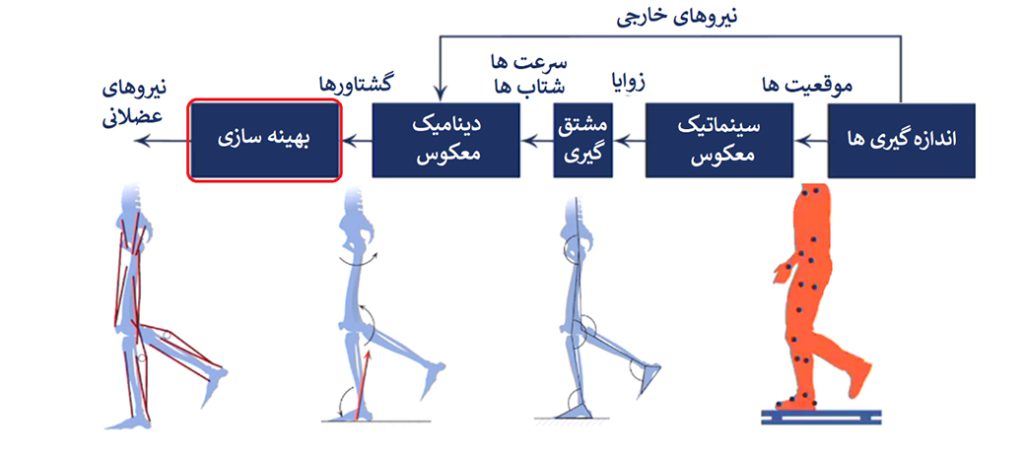
به دنیای جذاب بیومکانیک خوش آمدید. همانطور که در شمارههای پیش گفته شد، بحث دینامیک معکوس در تحلیل بیومکانیک حرکت بسیار پرکاربرد است. مراحل گذشته در روند دینامیک معکوس که شامل بررسی ابزارهای سنجش و اندازهگیری پارامترهای سینماتیکی (موقعیت، زاویه، سرعت، شتاب و…)، سینماتیک معکوس (محاسبات زوایا از روی موقعیتهای اعضا و مفاصل)، مشتقگیریها و محاسبات سرعت و شتاب، و خود بحث دینامیک معکوس (محاسبات سینتیکی نیروها و گشتاورهای برآیند مفصلی) بود مورد بررسی قرار گرفت.
در این قسمت مطابق شکل ۱، به مرحله بعدی که بسیار مهم و حیاتی است، یعنی تخمین نیروهای عضلانی با روش بهینهسازی (و احیانا روشهای دیگر مانند ثبت سیگنال الکترومایوگرافی عضلات، و…) میپردازیم.
در مقاله گذشته اشاره شد که در انتهای معادلات تعادل گشتاوری حاصل از دینامیک معکوس، گشتاور برآیند مفصلی محاسبه میشود که به طور عمده ناشی از نیروهای عضلات اطراف مفصل است هرچند عوامل دیگری مانند نیروهای بافتهای پسیو لیگامانی یا اصطکاک مفصلی نیز در گشتاور برآیند مفصلی تأثیر دارند، منتهی نسبت به نیروهای عضلات، ناچیز و قابل صرفنظر هستند. لذا از روی گشتاور برآیند مفصلی، نیروهای عضلانی باید محاسبه یا تخمین زده شوند. شکل ۲، نمونههایی از نمایش گشتاورهای برآیند مفاصل اندام تحتانی را به همراه تأثیر نیروهایی عضلانی نشان میدهد. به عبارتی دیگر، برآیند گشتاورهای حاصل از نیروهای عضلانی حول مفصل برابر همان گشتاور برآیند مفصلی (Net Joint Moment) میشود.
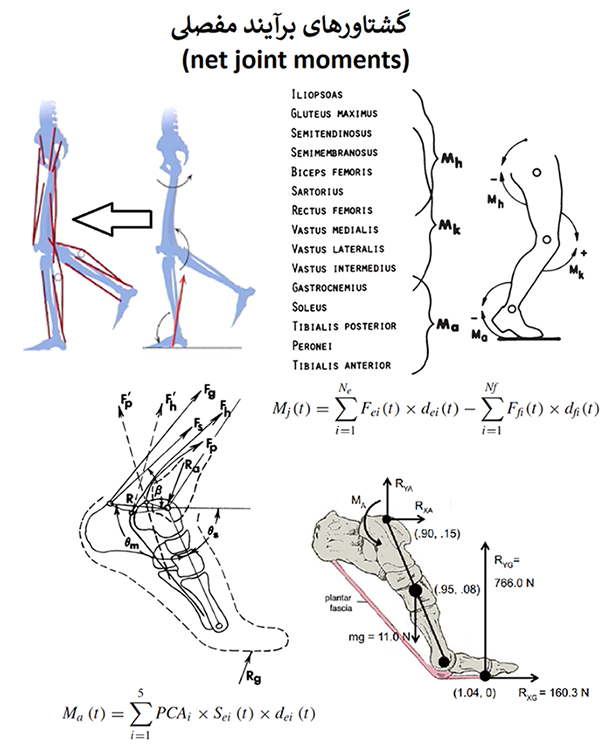
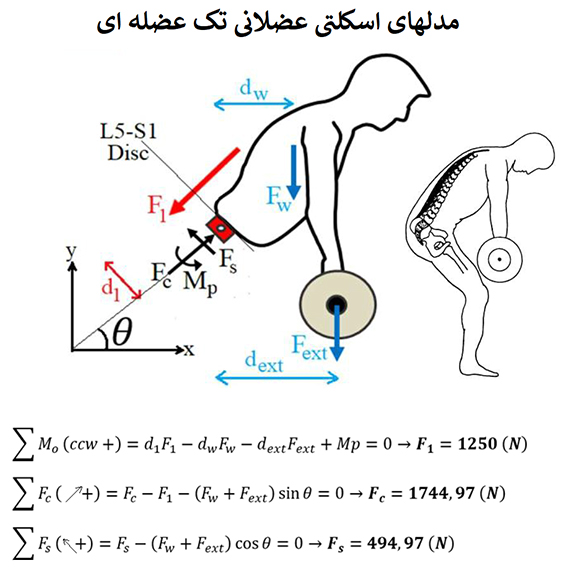
حال در تخمینهای نیروهای عضلانی ممکن است به مدلهای اسکلتی عضلانی تکعضلهای یا چندعضلهای برخورد کنیم که بسته به نیاز و دقت فعالیت مورد بررسی، تعداد عضلات مؤثر در آن فعالیت در مدل لحاظ میشود. در مدلهای تکعضلهای که فرض میشود یک دسته یا یک گروه عضلانی مؤثر به صورت تک نیرو در اطراف مفصل عمل میکند، تخمین نیرو بسیار سادهتر است زیرا با داشتن گشتاور برآیند مفصلی و فاصله گشتاور عضله از مرکز مفصل (با کمک علم کینزیولوژی)، به راحتی نیروی عضله و به تبع آن نیروی مفصل تخمین زده میشود. شکل ۳، محاسبات مربوط به یک نمونه مدل تک عضلهای ستون فقرات را برای تخمین نیروی عضلات ارکتور اسپاین یا راست کننده ستون فقرات کمری (Erector Spinae Muscles) نشان میدهد (که بعد از تخمین نیروی عضلات ارکتور اسپاین کمری با معادلات تعادل نیرویی، نیروهای فشاری و برشی دیسک کمر نیز محاسبه شده است).
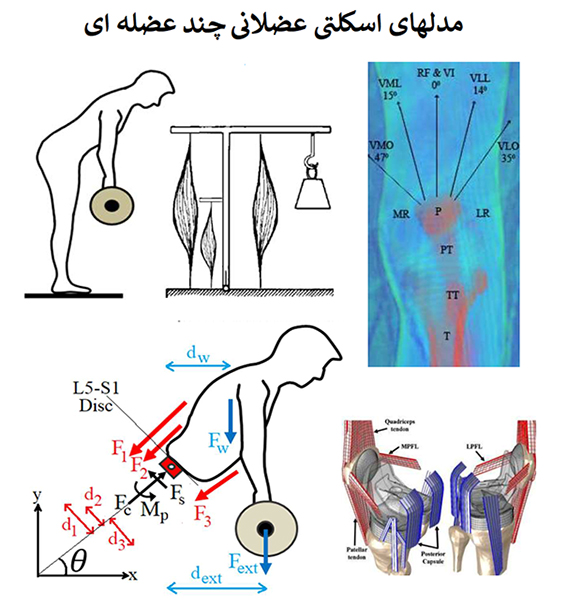
منتهی در برخی فعالیتها یا مدلسازیها، لحاظ کردن یک گروه عضله کافی نیست و دقت لازم را ندارد، لذا به ناچار باید چند دسته یا چند گروه از عضلات مؤثر در آن فعالیت را در مدل لحاظ کرد. لذا مطابق شکل 4، مدلسازی چندعضلهای در حالات دو بعدی و سه بعدی صورت میگیرد. به عنوان نمونه، در یک مدل چندعضلهای ستون فقرات کمری در باربرداری، سه گروه عضلات شکمی، لوکال (موضعی) کمری، و گلوبال (سرتاسری) کمری در شکل 4 لحاظ شدهاند یا در مدل چندعضلهای سه بعدی زانو، پنج دسته از عضلات چهار سرران (راست رانی+پهن میانی، پهن خارجی بلند، پهن خارجی مایل، پهن داخلی بلند، و پهن داخلی مایل) در شکل ۴ لحاظ شدهاند. هر کدام از این مدلسازیها به دقت مورد نیاز و نوع فعالیت مورد بررسی نیز بستگی دارد.
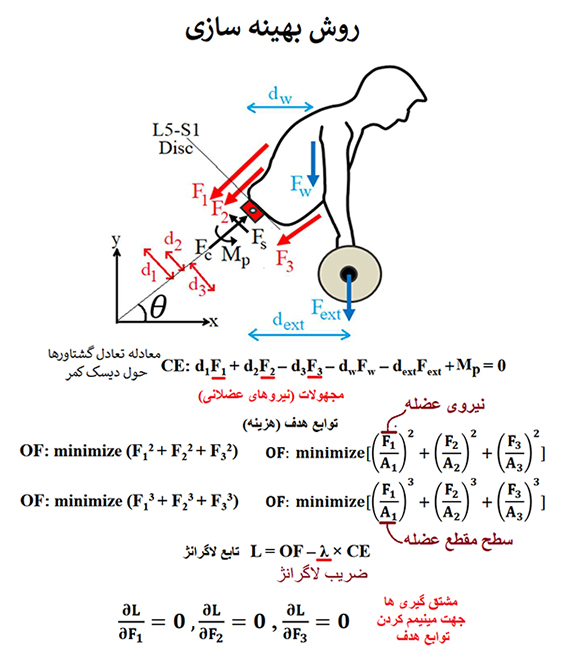
پس از اینکه مدل چندعضلهای ساخته شد، نوبت به تخمین نیروهای عضلانی میرسد. منتهی از آنجا که در مدل چند عضلهای، تعداد مجهولات (چند نیروی عضله) از تعداد معادلات (یک معادله تعادل گشتاوری) بیشتر است، مسئله نامعین است. یکی از روشهای افزودن تعداد معادلات (که با تعداد مجهولات برابر شود) استفاده از روش بهینهسازی است. در واقع، در این روش، یک تابع هدف (Objective Function=OF) یا تابع هزینه (Cost Function=CF) از نیروهای عضلانی در مدل تعریف میشود. به طور مثال تعریف میشود مجموع مجذور یا مکعب نیروها یا تنشهای عضلانی باید مینیمم شود. سپس مطابق شکل ۵ یک تابع لاگرانژ با ضریب لاگرانژ λ تعریف میشود و یکسری مشتقگیریها از تابع لاگرانژ صورت میگیرد و حاصل مشتقگیری برابر صفر قرار داده میشود تا تابع هدف مورد نظر مینیمم شود. اینکه به چه دلیل توابع هدفی مانند مینیمم کردن مجذور یا مکعب عضلات فرض میشود، یک مبنای صرفا محاسباتی و ریاضیاتی است و اساس فیزیولوژیک ندارد. منتهی در برخی مطالعات فرض بر این است که مینیمم کردن مجموع مکعب تنشهای عضلانی، نیروهای عضلات را کمی یکنواخت تر بین عضلات مختلف توزیع میکند و از این رو باعث کاهش خستگی در عضلات میشود، منتهی این امر فرضیهای است که در واقعیت به اثبات نرسیده است و صرفاً یک مبنای ریاضیاتی است.
شکل ۵ روند کلی محاسبات بهینهسازی را برای تخمین نیروهای عضلات در مدل چند عضلهای نشان میدهد.
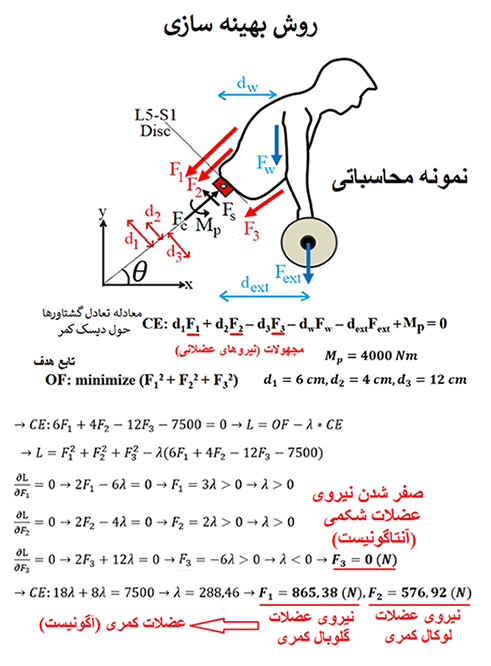
حال به بررسی یک مثال عددی از روش بهینهسازی در فعالیت باربرداری در مدل سه عضلهای مذکور میپردازیم. با داشتن فاصله گشتاورهای هر سه عضله (از علم کینزیولوژی)، بار خارجی، وزن بالاتنه، پارامترهای هندسی مورد نیاز (مانند زاویه خمش بالاتنه) و گشتاور غیرفعال یا پسیو حول دیسک کمر (ناشی از سفتی بافتهای پسیو اطراف مفصل مانند لیگامانها و خود دیسک بین مهرهای)، میتوان معادله تعادل گشتاورها را حول دیسک کمر نوشت که در آن نیروهای سه عضله مجهول هستند. سپس با تعریف تابع هدف مینیمم کردن مجموع مجذور نیروهای عضلانی، با تعریف تابع لاگرانژ و مشتقگیریهای مربوطه، به معادلات اضافه میشود و در نهایت با حل چند معادله چند مجهول، نیروهای هر سه دسته عضله محاسبه میشود. شکل ۶ این موضوع را به خوبی نمایش میدهد.
همانطور که در شکل ۶ مشاهده میشود، نیروهای عضلات شکمی که گشتاور خلاف جهت عضلات کمری و همجهت با بار خارجی اعمال میکند، آنتاگونیست است (و به ضرر سیستم است زیرا باعث افزایش نیرو و فشار دیسک کمر میشود، ولی اساس بهینهسازی بر مبنای کمتر کردن اعمال نیرو به عضلات و مفاصل است). در حالیکه گشتاور حاصل از نیروهای عضلات کمری به نفع سیستم است و با گشتاور وزن و بار خارجی مقابله میکند و آگونیست است. لذا روش بهینهسازی به جهت مینیمم کردن، نیروهای عضلات انتاگونیست شکمی را صفر میکند، در حالی که در واقعیت ممکن است اینگونه نباشد و عضلات شکمی نیز در این فعالیت، نیرو داشته باشند. این موضوع یکی از ایرادات روش بهینهسازی است.
این مقاله نیز به مبحث تخمین نیروهای عضلانی مدل چند عضلهای به روش بهینهسازی پرداخت و به امید خدا در مقاله آینده، ادامه جزئیات و ویژگیهای بهینهسازی و همچنین روش الکترومایوگرافی، در تخمین نیروهای عضلانی بررسی و مقایسه خواهند شد.
به دوستانی که در حوزههای مرتبط با بیومکانیک فعالیت میکنند توصیه میشود منابع این مقاله را که از جمله منابع اساسی و بنیادین بیومکانیک هستند مطالعه کنند.
منابع:


دیدگاه ها