

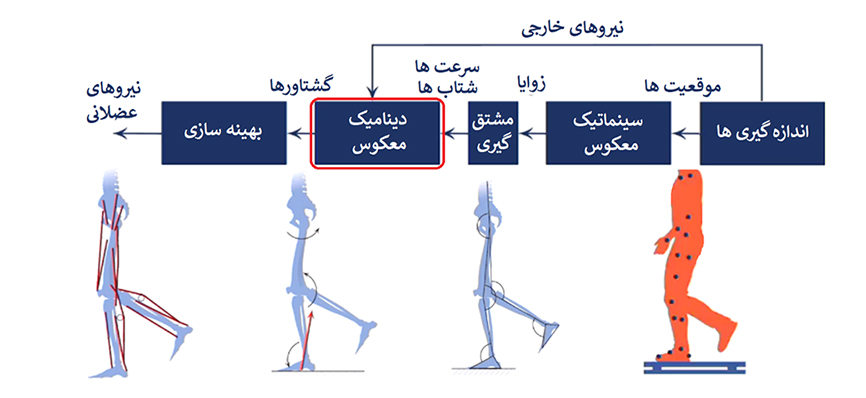
به دنیای جذاب بیومکانیک خوش آمدید! گفته شد که بحث دینامیک معکوس در تحلیل بیومکانیک حرکت بسیار پرکاربرد است. مراحل گذشته در روند دینامیک معکوس که شامل بررسی ابزارهای سنجش و اندازهگیری پارامترهای سینماتیکی (موقعیت، زاویه، سرعت، شتاب و…) سینماتیک معکوس (محاسبات زوایا از روی موقعیتهای اعضا و مفاصل) و مشتقگیریها و محاسبات سرعت و شتاب بود مورد بررسی قرار گرفت.
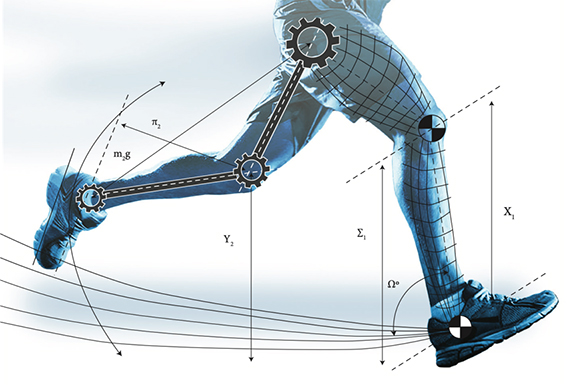
در این مبحث مطابق شکل 1، به مرحله بعدی که اساسیترین مرحله است، یعنی معادلات خود دینامیک معکوس و محاسبات نیروها و گشتاورهای برآیند مفصلی میپردازیم.
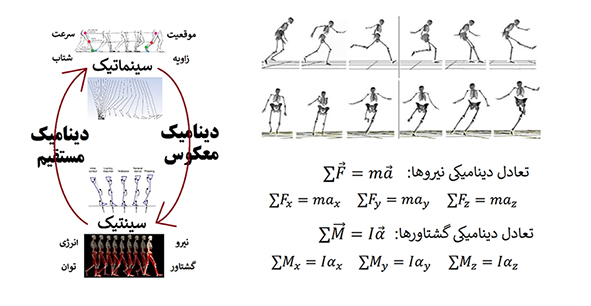
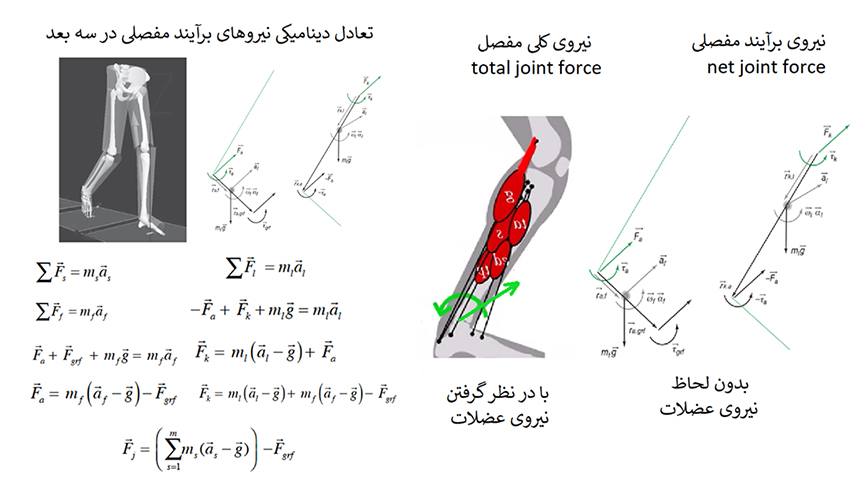
معادلات تعادل دینامیکی نیوتن-اویلر در فضای سه بعدی شش دسته هستند که شامل سه معادله تعادل نیرویی (نیوتن) و سه معادله تعادل گشتاوری (اویلر) در راستاهای x,y,z هستند. در معادلات نیوتن، برآیند نیروهای وارد بر یک عضو بدن برابر حاصلضرب جرم عضو در شتاب مرکز جرم آن است، همچنین در معادلات اویلر، برآیند گشتاورهای وارد بر یک محور از عضو بدن (مانند محور مرکز جرم) برابر حاصلضرب ممان اینرسی عضو حول همان محور در شتاب زاویهای آن است. صرفاً جهت یادآوری یک نکته کلی، دینامیک معکوس محاسبات از سینماتیک به سینتیک حرکت است و دینامیک مستقیم، محاسبات از سینتیک به سینماتیک حرکت است. در صورت امکان در مقالات آینده در مورد دینامیک مستقیم بهطور دقیقتر بحث خواهد شد. شکل ۲ این موارد را بهخوبی نشان میدهد.
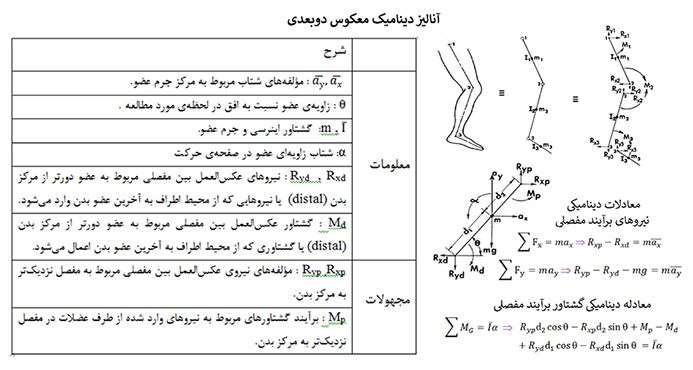
یک نکته بسیار مهم در روش نیوتن-اویلر این است که محاسبات از مفاصل دیستال (دورتر از بالاتنه) شروع میشود و به مفاصل پروگزیمال (نزدیکتر به بالاتنه) میانجامد. به عبارتی اگر در اندام تحتانی بخواهیم نیروها و گشتاورهای برآیند مفصلی را محاسبه کنیم، ابتدا با نوشتن معادلات برای عضو پا، نیرو و گشتاور مفصل مچ پا را محاسبه کرده، سپس با داشتن آن و نوشتن معادلات برای عضو ساق، نیرو و گشتاور مفصل زانو را محاسبه میکنیم و به همین ترتیب تا مفاصل بعدی پیش میرویم. منتهی، در حالت کلی پیش از نوشتن معادلات باید نمودار جسم آزاد یا دیاگرام آزاد نیروها و گشتاورهای وارد بر هر عضو را مطابق شکل 3 مشخص کنیم و سپس معادلات مربوطه را بنویسیم. به عنوان نمونه، شکل ۳ معادلات تعادل نیوتن-اویلر را در حالت دو بعدی برای سه عضو ران، ساق و پا در اندام تحتانی ارائه میدهد. هر عضو دارای نیروی وزن، مرکز جرم، ممان اینرسی، شتاب خطی و زاویهای، و نیروها و گشتاورهای دو مفصل پروگزیمال و دیستال خود هستند که در بین این پارامترهای بیومکانیکی، نیروها و گشتاورهای مفصل دیستال عضو مجهولات مسئله هستند و باید محاسبه شوند. به طور معمول، گشتاورها حول مرکز جرم عضو نوشته میشوند.
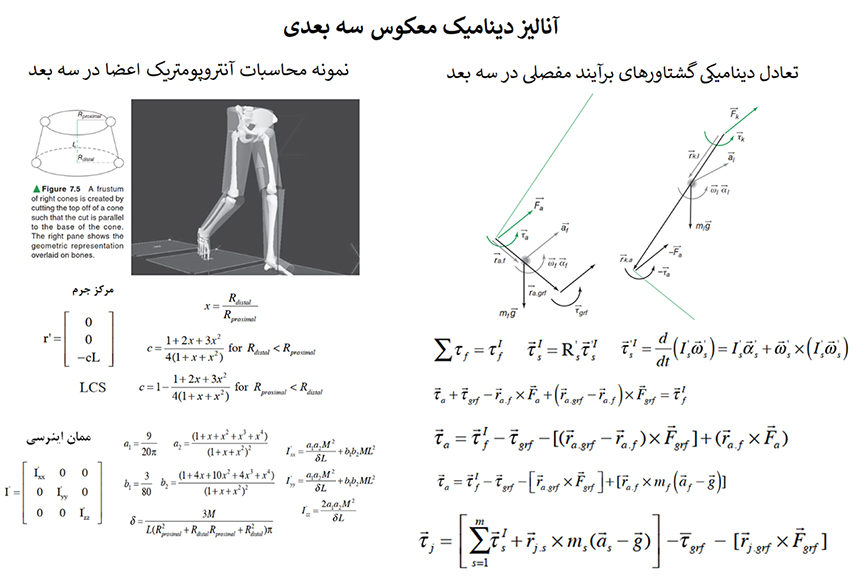
در حالت سه بعدی، کلیت روش مانند آنچه در دو بعد ذکر شد است، منتهی در این حالت اغلب معادلات و محاسبات به صورت بردارهای سه بعدی هستند. معادلات برداری نیوتن برای محاسبات نیروهای سه بعدی برآیند مفصلی در شکل ۴ نشان داده شدهاند. در اینگونه محاسبه برای هر عضو، مشابه قبل دیاگرام آزاد به صورت برداری ترسیم میشود و با داشتن بردار نیروی وزن عضو و نیروهای برآیند مفصل دیستال، تیروهای برآیند مفصل پروگزیمال عضو محاسبه میشود. فقط در به کارگیری جهت بردار نیروها (به ویژه نیروی وزن) باید دقت کافی به عمل بیاید. نکته بسیار مهم در اینجا اینست که نیروی برآیند مفصلی (Net Joint Force) ناشی از اثر بارهای خارجی (مانند وزن، عکس العمل زمین و…) است و تأثیر نیروهای عضلانی در آن وارد نشده است. با افزودن تأثیر نیروهای عضلانی به معادلات نیوتن، نیروی کل مفصلی (Total Joint Force) به دست میآید که بررسی آن در بحث ریسک آسیب مفصل مؤثرتر است، منتهی در مورد نیروهای عضلانی به امید خدا در مقالات آینده بحث خواهد شد.
نکته مهم دیگر بحث مربوط به محاسبات آنتروپومتریک است که مربوط به جرم، مرکز جرم، و ممان اینرسی اندامهای بدن است. برای این موضوع مطالعات آزمایشگاهی و آماری بسیاری صورت گرفته است. یکی از این حالات، در نظر گرفتن هر عضو بدن به شکل مخروط ناقص است (شکل 5). لذا با توجه به فرمولهای هندسی موجود برای حجم مخروط ناقص، مرکز جرم و ممان اینرسی آن قابل محاسبه خواهد بود. طول و جرم اعضا نیز با مطالعه آزمایشگاهی یا ضرایب موجود در جداول آماری آنتروپومتری قابل دستیابی است. به خصوص پارامتر ممان اینرسی هر عضو است که در محاسبات گشتاورهای برآیند مفصلی به کار میرود. در محاسبات گشتاور نیز مشابه قبل، از مفصل دیستال عضو به سمت پروگزیمال میرویم. دیاگرام آزاد هر عضو شامل گشتاور وزن و یا بار خارجی، گشتاور اینرسی و گشتاورهای برآیند مفاصل دیستال و پروگزیمال است (شکل5).
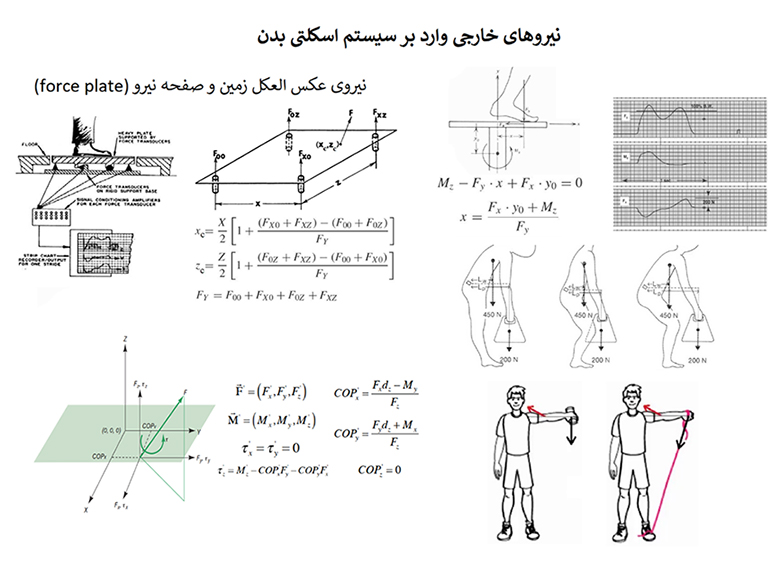
در انتها باید به این نکته نیز توجه داشت که نیروهای خارجی وارد بر بدن چند دسته هستند. نیروهای وزن اعضا، وزنه یا بار خارجی، کشش ابزارهای کشسان همچون فنر و کابل و همچنین نیروی عکس العمل زمین که با صفحه نیرو (Force Plate) اندازهگیری میشود. همچنین با محاسبات تعادل گشتاوری سنسورهای نیرو موجود در صفحه نیرو مرکز فشار نیز قائل محاسبه و ردیابی است که برخی از نمونه محاسبات دو بعدی و سه بعدی آن در شکل 6 نشان داده شده است.
در این مقاله نیز به مبحث اصلی دینامیک معکوس (محاسبات سینتیکی نیروها و گشتاورهای برآیند مفصلی) پرداخته شد و به امید خدا در مقالات آتی، ادامه مرحله دینامیک معکوس (روشهای تخمین نیروهای عضلانی و…) در بیومکانیک حرکت شرح داده خواهد شد.
به دوستانی که در حوزههای مرتبط با بیومکانیک فعالیت میکنند توصیه میشود منابع این مقاله را که از جمله منابع اساسی و بنیادین بیومکانیک هستند مطالعه کنند.
منابع


دیدگاه ها